Bugbert: REBUILT 2026
Built for the 2026 FRC game, REBUILT, Bugbert was designed to pick up fuel (6 inch foam balls), hold it in a hopper, and shoot it into a 6 foot high goal. Thanks to a 30 ball hopper and a wide shooter, it was able to quickly intake and hold balls, and shoot two-three at a time. Thanks to a positional shooting program, it was able to score fuel from anywhere in the alliance zone. Its built-in vision cameras allowed it to see Apriltags, enabling several powerful autonomous programs.
Glorp: Bunnybots 2025
Built for the 2025 offseason competition, Bunnybots, Glorp was designed to shoot 7 inch foam footballs into a high and low goal. It had a side intake which relied on gravity and was made from lexan. The intake allowed the football to be rolled into the midstage from any orientation. The midstage acted as a conveyor belt to orient the footbal vertically and launch the football into the spinning shooter to score in one of the goals.
Percy: Reefscape 2025
Built for the 2025 FRC game, Reefscape, Percy had a unique design with a spinning intake attached to an elevator that allowed it to pick up and score both Algae (big kickballs), and Coral (PVC pipe). Percy could score on multiple levels of the Reef, extending its elevator all the way up to reach a pedestal six feet off the ground. Additionally, it was also able to play defensive against opposing robots thanks to its quick and powerful swerve drive powered by Kraken motors.
Whiterabbit: Bunnybots 2024
Built for the 2024 offseason competition, Bunnybots, Whiterabbit was designed to "skewer" 5-gallon buckets by picking them up from the inside and stacking them in a scoring area. It was made up of a pivoting arm attached to a wrist which would allow the robot to pick up buckets on their side. This was also our first robot where we used Neo motors for our swerve drive. Whiterabbit now serves as one of our outreach robots.
iBeam: Crescendo 2024
Built for the 2024 FRC game, Crescendo, iBeam was designed to quickly pick up notes from the ground and accurately shoot them into the Speaker or Amp scoring zones. iBeam was a very agile robot with two vision processing units, one used for Apriltag tracking and the other used for note tracking. Later on, a climb mechanism was added which allowed the robot to climb onto the Stage consistently in around 8 seconds. Additionally, iBeam had a wide collection of autonomous routines, the most notable being its 4-note auto. iBeam now serves as one of our outreach robots.

Linguini: Bunnybots 2023
Built for the 2023 offseason competition, Bunnybots, Linguini is designed to move yoga balls from one end of the field to another, where it then had to elevate and place the ball in a "burrow" to score. Similarly to Scalene, Linguini was our first robot to utilize a swerve drive during an offseason competiton.

Scalene: Charged Up 2023
Built for the 2023 FRC game, Charged Up, Scalene went through multiple iterations to most effectively pick-up cones and cubes from the ground, and both substations, to place them in the hybrid and middle nodes. This is the first season FRC 5587 implemented a swerve drive and it allowed Scalene to be agile while navigating across the field. Additionally, Scalene boasts consistent autonomous and endgame balance routines which allow Scalene to maximize points.
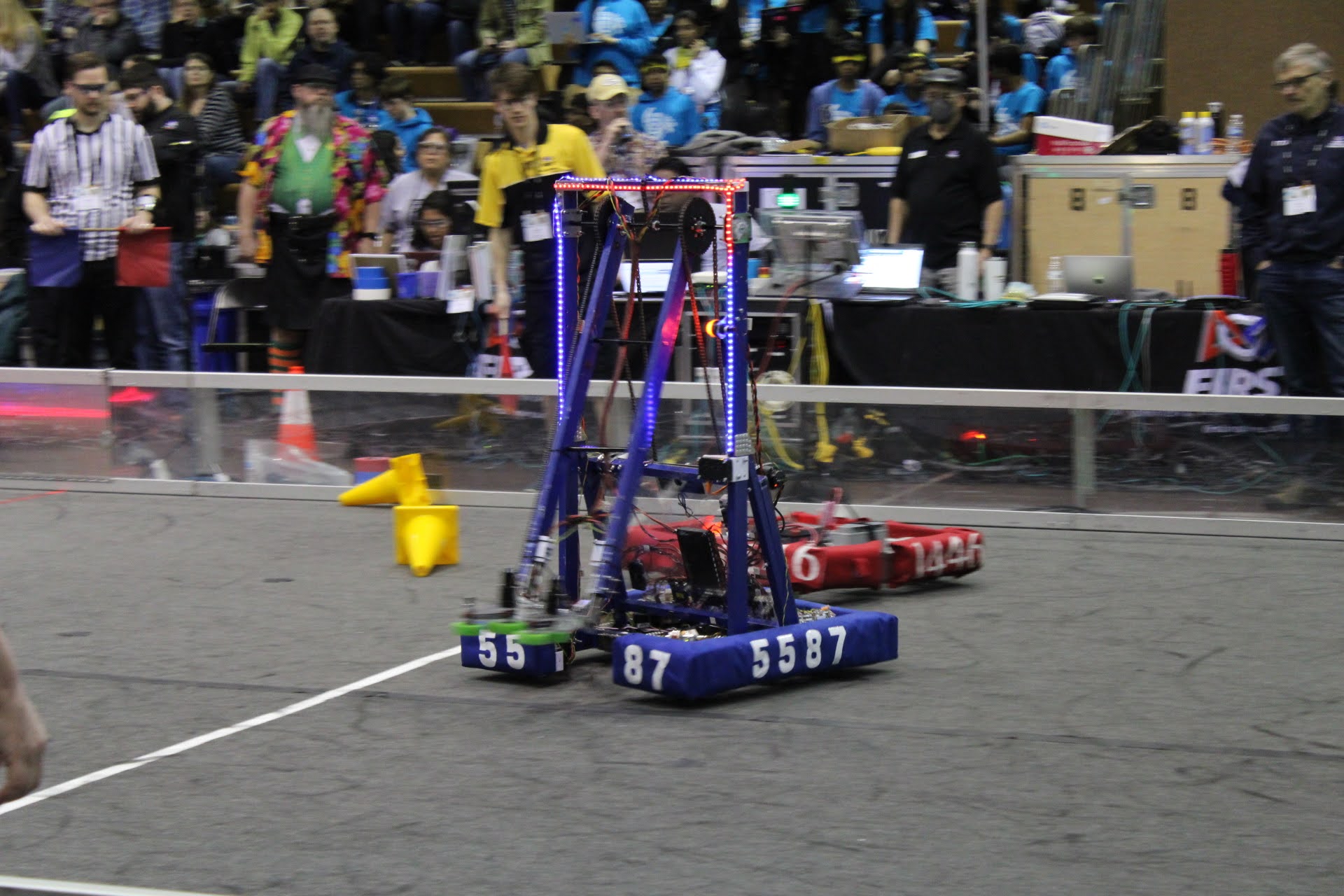
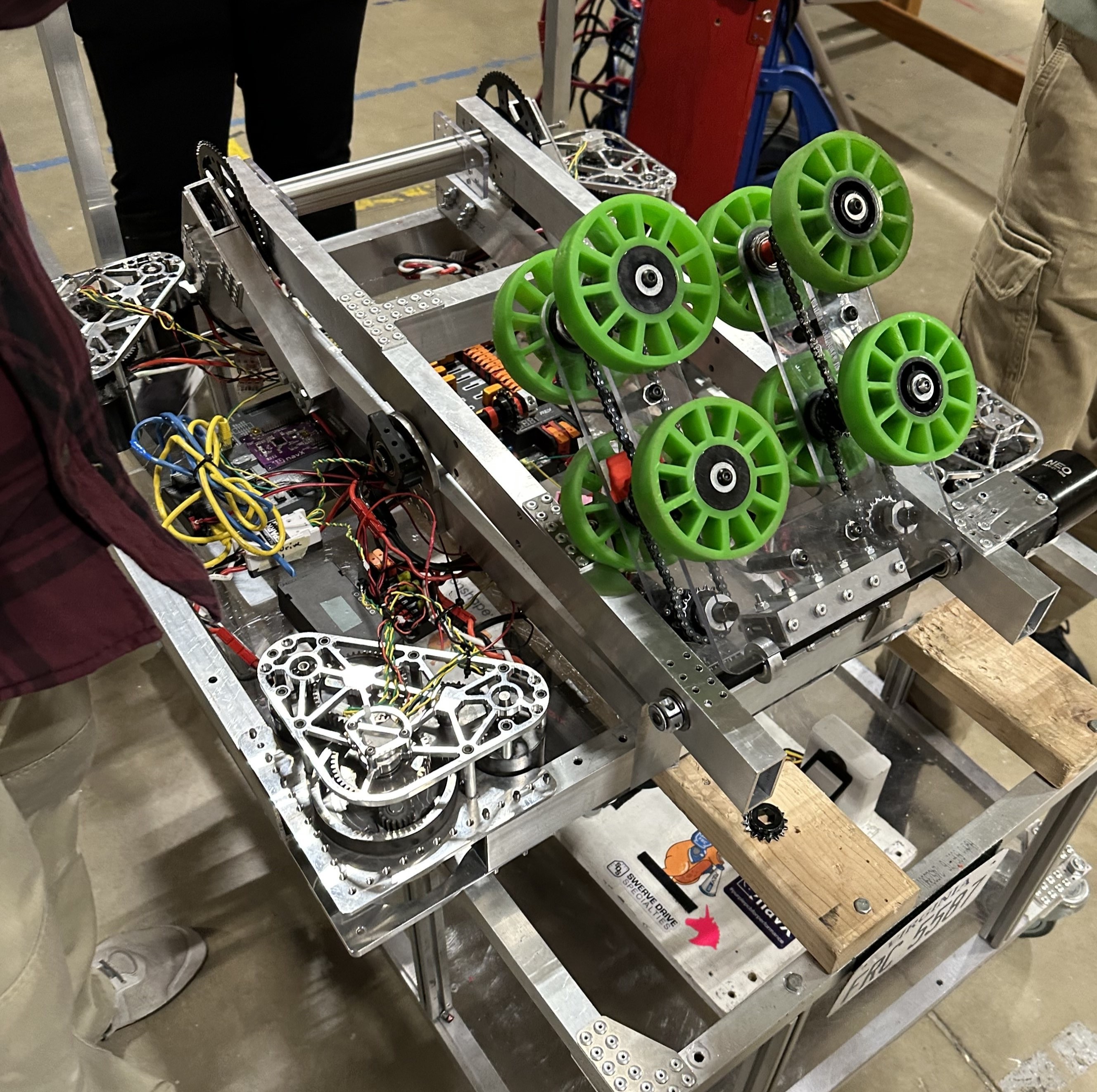
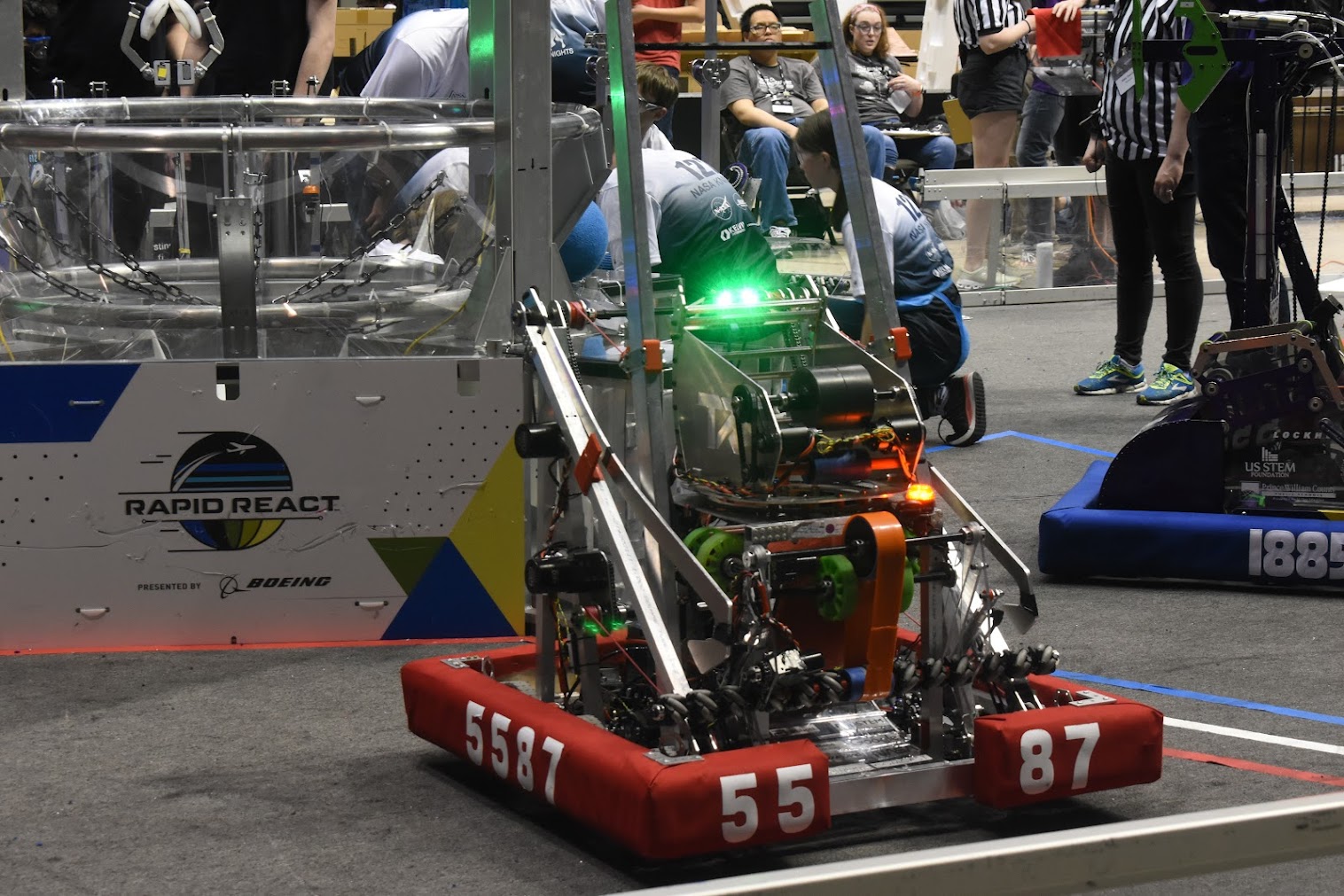
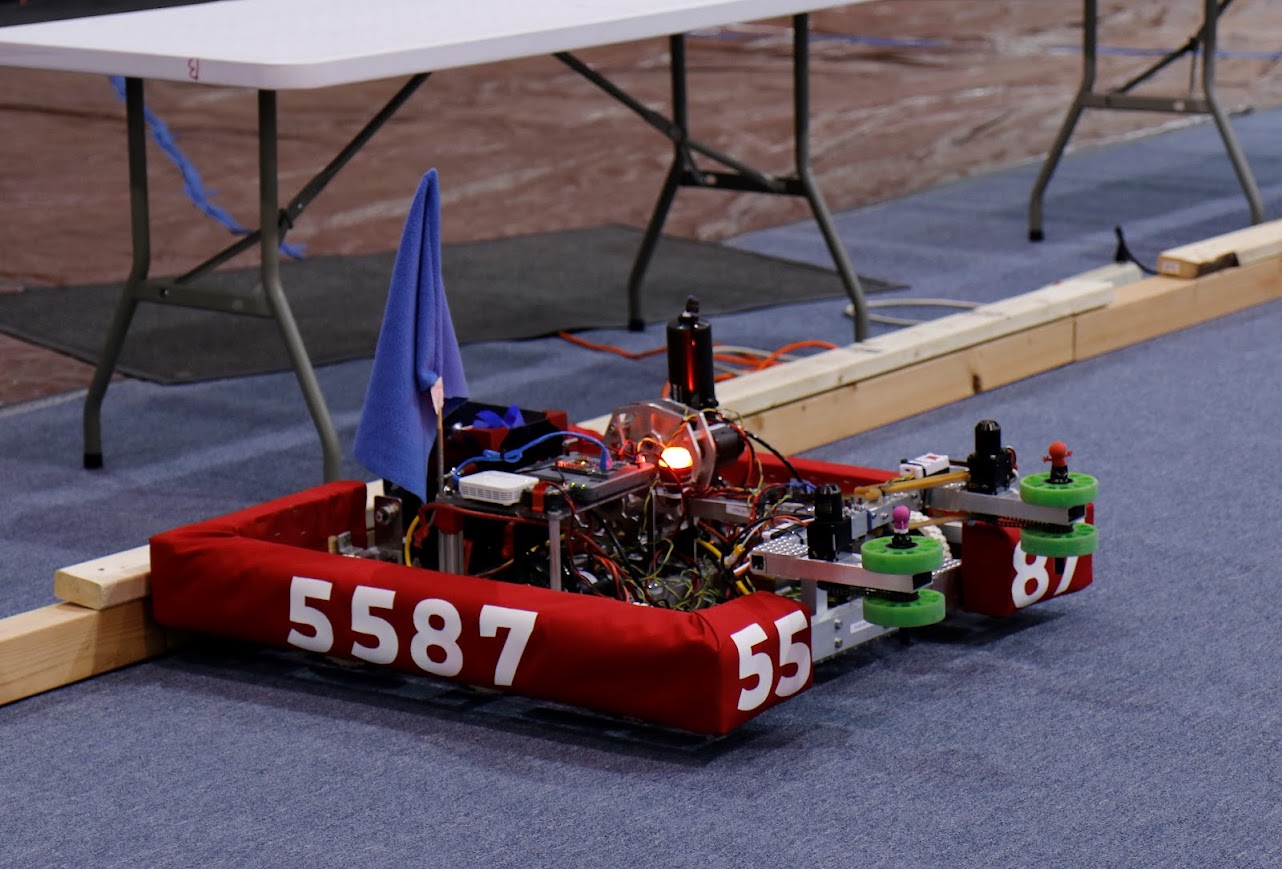
Anklebiter: Rapid React 2022
Built for the 2022 FRC game, Rapid React, Anklebiter was designed to efficiently and accurately make shots to the Upper Hub during both autonomous and teleoperated modes using its turreted shooter. Additionally, Anklebiter iterated through many climb designs, however ended with a design allowing for a consistent traversal climb in under 10 seconds. Anklebiter also had quality autonomous routines, most notably its 5-ball auto.
Rainmaker: Bunnybots 2021
Built for the 2022 offseason competition, Bunnybots, Rainmaker was designed to intake and move crates from the center of the field to 4 different corners. Additionally, Rainmaker had the ability to "dump" a (stuffed) bunny into one of the corners to score additional points. During the autonomous period, Rainmaker could pick up a crate and score. Rainmaker is still used today as an outreach robot.
Bob the Buildmo: Game Changers At Home 2021
Built for the FRC gameGame Changers At Home Challenges, Bob the Buildmo was built on the same powerful chassis as El Salmandor. Bob featured a lightning-quick hooded shooter and vectored intake design, feeding into a multi-stage high powered conveyor system. In addition, it contained the most advanced path following software we have ever attempted, which was able to autonomously detect the yellow "power cells" on the floor and move to collect them. Bob also featured very advanced limelight targeting to accurately score in the inner goal.
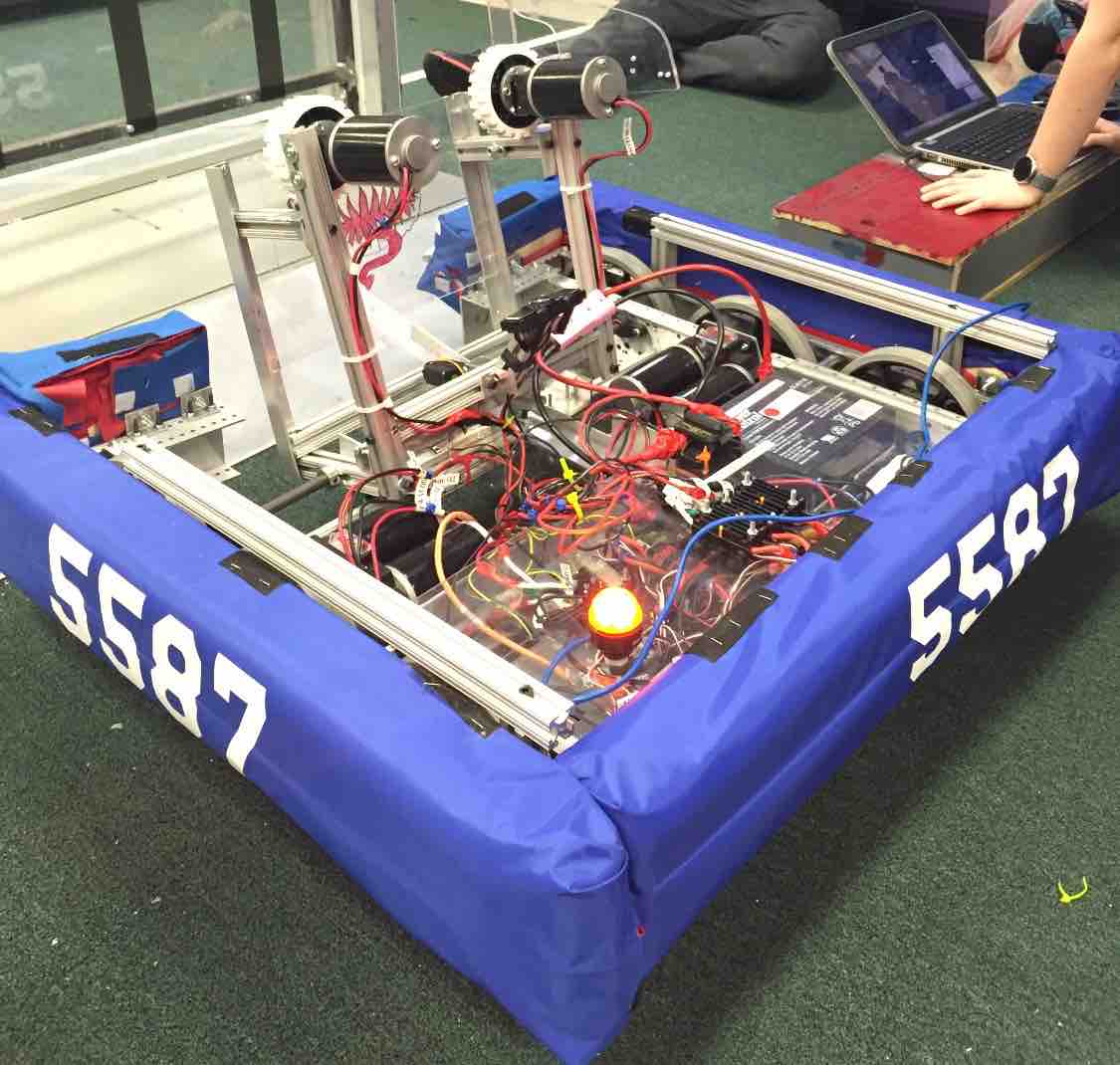
El Salmandor: Infinite Recharge 2020
Built for the 2020 FRC game, Infinite Recharge, El Salmandor was an efficient combination of a powerful double-flywheel shooter and a precise arm. It was designed without any pneumatic system in order to reduce points of failure and remain lightweight. It also featured a meticulous targeting system based around the Limelight, an advanced vision system. It was capable of scoring in the inner goal and completing a climb at the end of a match.

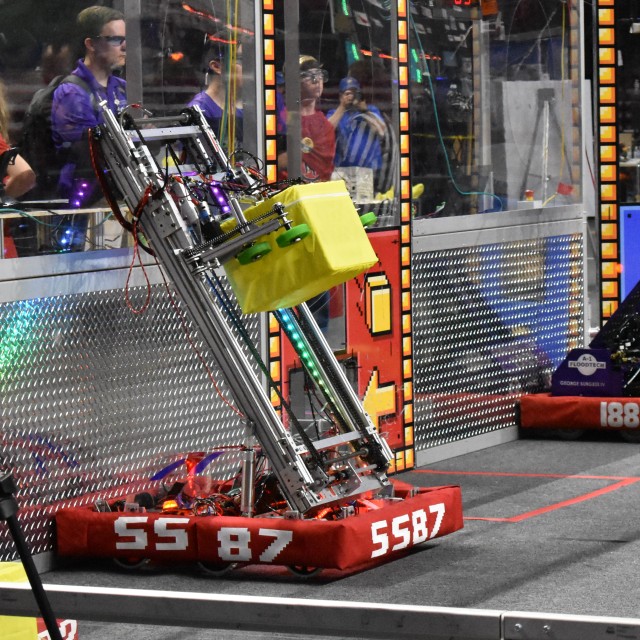
Ted Bunny: Bunnybots 2019
Built for the 2021 offseason competition, Bunnybots, Ted Bunny started as our first experiment with a peanut chassis, a compact and energy efficient drivetrain, featuring a very lightweight hooded flywheel shooter, and bumper cutout style intake. It was able to pick up and store multiple 4" wiffle balls, and fire them through its quick shooter. The shooter was also designed to shoot our "bunny" for that year to score extra points.

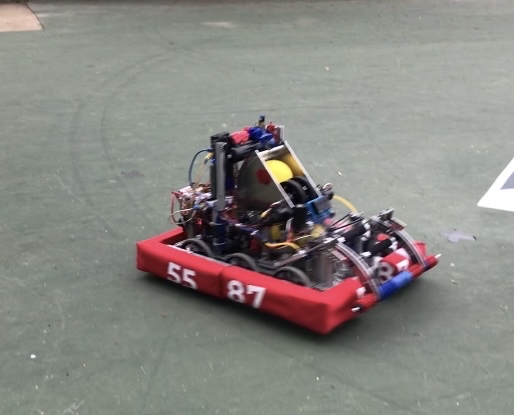
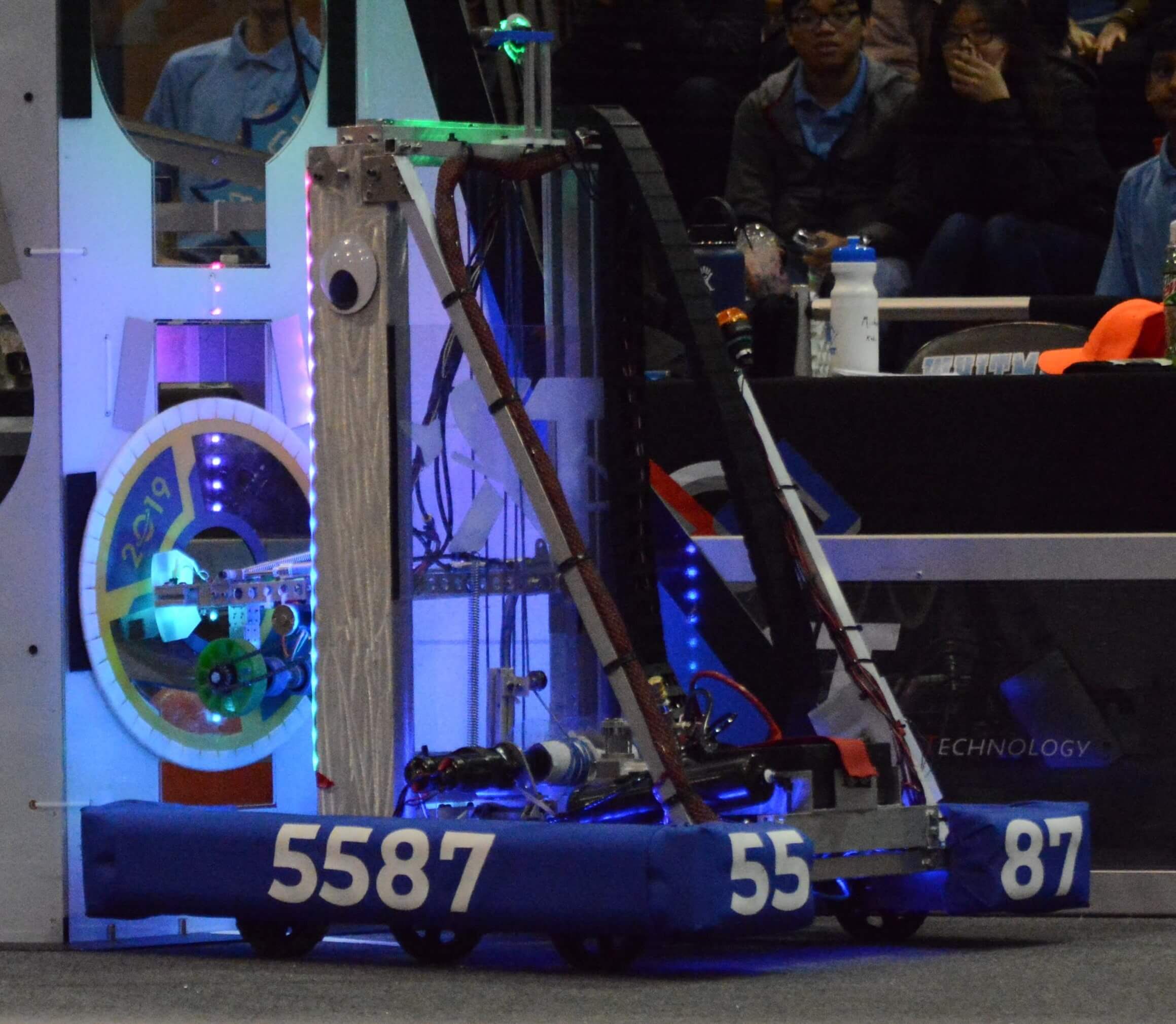
Guilloutina: Deep Space 2019
Built for the 2019 FRC game, Deep Space, Guilloutina was designed to place balls and hatch panels at all three levels of the rocket. During the sandstorm period, Guilloutina can be controlled through driver cameras and vision code to align onto field targets, allowing scoring on both the cargoship and rocket.
Kernbread: Power Up 2018
Our robot designed for the 2018 FRC game Power Up, named Kernbread, was capable of placing cubes on the scale or switch as well as pushing cubes into the exchange. The robot was also able to score points in the switch during the autonomous period, using motion profiling to complete either a left, center, or right autonomous run.
Tractor: Bunnybots 2018
Built for the 2018 offseason competition, Bunnybots, Tractor was designed to carefully pick up racquetballs and precisely deposit them into a milkcrate from its large hopper. Using clever plastic thermoforming techniques, we were able to construct the entire hopper from a single piece of polycarbonate plastic. It also contained a small pincer to accurately position the "bunny" inside of the milk crates. In addition, this robot represented our first experience with creating a vertical electrical board, designed to have a very compact form factor.

Kernflake: Offseason 2018
Kernflake began in the 2017 offseason as our practice drive train, proving useful for gaining experience with the construction of a drive train. However, Kernflake ended up as the robot for the 2018 Power Up season after being fitted with withheld mechanisms after stop build day.

Good Vibes: Steamworks 2017
Our robot from the 2017 FRC game Steamworks, named Good Vibes, was a primarily gear and climb-oriented robot. This robot was able to score points in autonomous mode and retrieve fallen gears from the ground. The robot also used a winch to climb the side of an airship, scoring even more points in the end-game.

Caligula: Stronghold 2016
Caligula, our robot from the 2016 FRC game Stronghold, was designed with a low profile, allowing for quick navigation of various obstacles in the arena and shots into both the low and high goals.
Christopher: Recycle Rush 2015
Our robot from the 2015 FRC game Recycle Rush was named Christopher. As the first robot we built, Christopher demonstrated the skill and dedication of the newly formed team. Christopher could stack and move totes, lift trash cans, and deposit "litter" into trash cans stacked upon totes.